책소개
옛 지식이 아닌 '현대 지식'으로
제어공학을 실감나게 배울 수 있다!
이 책은 전기/전자/제어/정보통신/기계/메카트로닉스 관련 학과 학생을 대상으로 한다. 제어 분야의 입문 단계 학습에 필요한 주요 이론들을 배울 수 있다. 기본 수학부터 시스템의 모델링 및 분석, 제어기 설계 순으로 설명하되, 단순히 수식을 나열하기보다는 물리적인 의미를 파악할 수 있도록 개념 이해에 중점을 두었다. 특히 명확하고 직관적인 개념 이해를 위해서 실제 사례, 삽화, 그림 등을 풍부하게 담았다. 관습처럼 가르치는 옛 지식이 아니라 학생들이 현장감과 창의력을 기를 수 있는 실용적인 '현대 지식'을 갖출 수 있게 하였다.
저자소개

목차
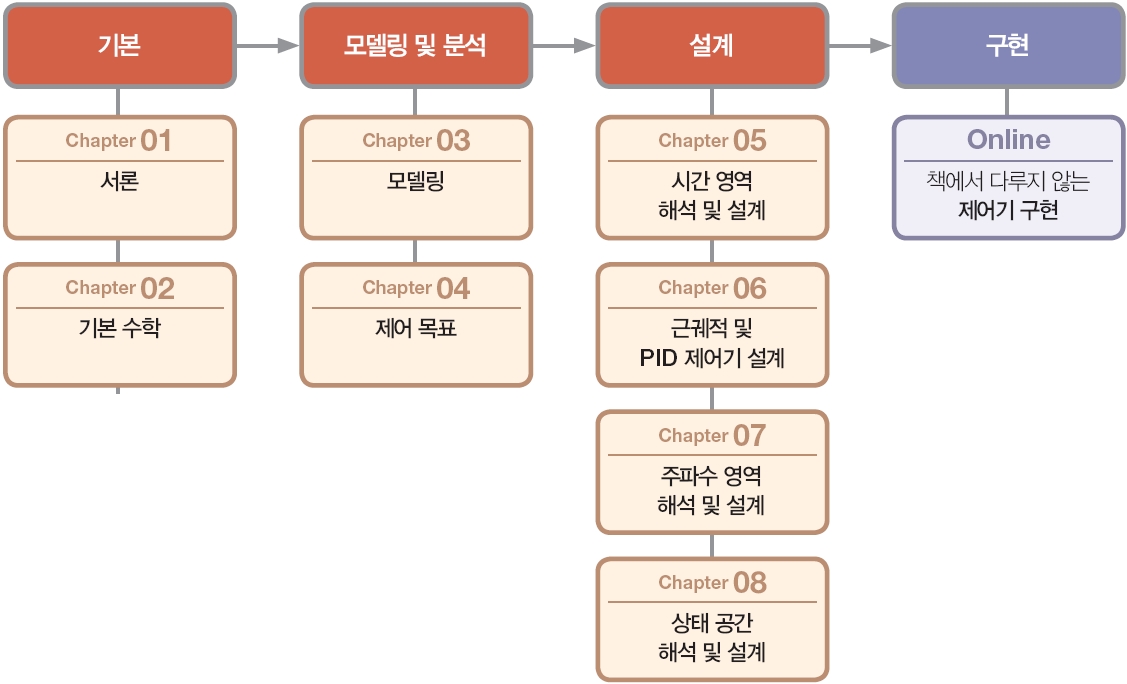
Chapter 01 서론
개요 - 15
1.1|개념적 제어 - 17
1.1.1 제어공학이란- · 17
1.1.2 제어시스템 모델 · 21
1.2|수리적 제어 - 25
1.2.1 개로 제어의 경우 · 26
1.2.2 폐로 제어의 경우 · 29
1.2.3 개로/폐로 제어기 비교 · 30
1.3|피드백 제어시스템의 실례 - 32
1.3.1 증기기관의 제어시스템 · 32
1.3.2 전동기의 고성능 제어시스템 · 37
1.3.3 우리나라 최초의 자동화 시스템 · 39
1.3.4 서비스 로봇과 관측기 기반 제어시스템 · 42
1.3.5 햅틱 기술을 활용한 정보교환 시스템 · 44
1.3.6 전력 시스템의 주파수 제어시스템 · 46
1.3.7 통신에서의 전력 제어시스템 · 48
1.3.8 경제학 및 생태계의 피드백 · 50
1.3.9 양성 피드백 · 53
1.3.10 위상 고정 루프 전자회로 · 54
1.4|제어시스템의 설계 과정 - 58
: : 핵심요약 - 60
: : 연습문제 - 61
Chapter 02 기본 수학
개요 - 71
2.1|미분방정식 - 76
2.1.1 수열의 점화식 · 76
2.1.2 간단한 미분방정식 · 77
2.1.3 미분방정식의 전략적 해법 · 82
2.1.4 비제차 미분방정식 · 83
2.2|라플라스 변환 - 90
2.2.1 라플라스 변환의 정의 · 91
2.2.2 라플라스 변환의 성질 · 93
2.2.3 라플라스 변환의 예 · 101
2.2.4 라플라스 역변환 · 105
2.2.5 선형 상미분방정식의 해법 · 114
2.3|전달함수 - 118
2.3.1 극점과 영점 · 121
2.3.2 극점이 시스템에 미치는 영향 · 122
2.3.3 영점이 시스템에 미치는 영향 · 124
2.4|상태방정식 - 129
: : 핵심요약 - 133
: : 연습문제 - 135
Chapter 03 모델링
개요 - 149
3.1|시스템의 모델링 - 151
3.1.1 동적 시스템 · 152
3.1.2 직류 및 교류 전동기 · 158
3.1.3 전력 시스템 · 173
3.1.4 확산과 파동 · 182
3.1.5 진자 시스템 · 188
3.1.6 마스터-슬레이브 시스템 · 198
3.2|임펄스 응답과 전달함수 - 203
3.3|블록선도와 신호 흐름도 - 207
3.3.1 블록선도 · 207
3.3.2 신호 흐름도 · 211
3.4|상태방정식과 전달함수의 블록선도 표시 - 220
3.5|비선형 시스템의 선형화 - 229
: : 핵심요약 - 234
: : 연습문제 - 238
Chapter 04 제어 목표
개요 - 255
4.1|기본 제어 목표 : 안정성과 성능 - 259
4.2|주요 제어 목표 : 안정성 - 262
4.2.1 안정성이란- · 262
4.2.2 전달함수에서의 안정성 판별 · 263
4.2.3 상태방정식에서의 안정성 판별 · 268
4.3|Routh-Hurwitz 안정성 판별법 - 271
4.4|피드백 시스템의 안정성과 성능 - 277
4.4.1 단위 피드백 시스템의 제어 목표 · 277
4.4.2 시간 응답과 시간 영역에서의 성능지표 · 279
4.4.3 주파수 응답과 주파수 영역에서의 성능지표 · 282
: : 핵심요약 - 296
: : 연습문제 - 297
Chapter 05 시간 영역 해석 및 설계
개요 - 311
5.1|시간 응답과 성능지표 - 313
5.2|1차 및 2차 시스템의 과도응답 - 316
5.2.1 1차 시스템의 과도응답 · 316
5.2.2 2차 시스템의 과도응답 · 321
5.3|과도응답 개선을 위한 극점 배치 설계 - 336
5.4|정상상태 응답과 시스템 형 - 341
: : 핵심요약 - 346
: : 연습문제 - 348
Chapter 06 근궤적 및 PID 제어기 설계
개요 - 355
6.1|근궤적의 기본 성질과 작성법 - 357
6.1.1 근궤적이란- · 358
6.1.2 근궤적의 기본 성질 · 365
6.1.3 근궤적의 활용법 · 374
6.2|근궤적을 이용한 P 제어기 설계 - 383
6.3|정상상태 응답 개선을 위한 PI 제어기 설계 - 387
6.4|과도응답 개선을 위한 PD 제어기 설계 - 390
6.5|PID 제어기 설계 - 393
6.5.1 PID 계수 동조법 · 397
6.5.2 적분 누적 방지법 · 401
6.5.3 변형된 형태의 PID 제어 · 404
: : 핵심요약 - 409
: : 연습문제 - 412
Chapter 07 주파수 영역 해석 및 설계
개요 - 419
7.1|주파수 응답과 성능지표 - 422
7.1.1 주파수 응답 · 422
7.1.2 주파수 영역에서의 성능지표 · 430
7.1.3 1, 2차 시스템의 주파수 응답과 시간 응답과의 관계 · 433
7.1.4 견실 안정성을 위한 안정성 여유 · 436
7.2|나이키스트 선도 - 441
7.2.1 나이키스트 선도 작성법 · 441
7.2.2 나이키스트 안정성 판별법 · 446
7.3|보데 선도 - 460
7.3.1 보데 선도 작성법 · 460
7.3.2 보데 선도의 활용 · 467
7.4|니콜스 선도 - 469
7.4.1 니콜스 선도 작성법 · 470
7.4.2 니콜스 선도의 활용 · 473
7.5|앞섬 및 뒤짐 보상기 설계 - 476
7.5.1 앞섬 보상기의 설계 · 478
7.5.2 뒤짐 보상기의 설계 · 483
7.5.3 앞섬 및 뒤짐 보상기의 설계 · 487
: : 핵심요약 - 494
: : 연습문제 - 496
Chapter 08 상태 공간 해석 및 설계
개요 - 509
8.1|상태 공간 모델의 시간 응답 - 511
8.2|상태 공간 모델의 안정성 - 516
8.3|상태 피드백 제어기 설계 - 519
8.3.1 극점 배치 제어 · 519
8.3.2 제어 가능성 · 522
8.3.3 제어 이득 계산 · 528
8.4|상태 관측기 설계 - 531
8.4.1 상태 관측기 · 532
8.4.2 관측 가능성 · 535
8.4.3 상태 관측기 이득 계산 · 538
8.4.4 축소 차수 상태 관측기 · 540
8.4.5 출력 피드백 제어기 · 544
8.5|최적 제어기와 최적 관측기 설계 - 551
8.5.1 최적 제어기 설계 · 551
8.5.2 최적 관측기 설계 · 554
8.5.3 최적 출력 피드백 제어기 설계 · 557
8.6|명령 추종기 - 561
: : 핵심요약 - 564
: : 연습문제 - 566
Appendix A|장별 부가내용 - 575
Appendix B|참고 문헌 - 615
찾아보기 - 618
부록/예제소스
| 자료명 | 등록일 | 다운로드 |
|---|---|---|
| 2017-01-13 | 다운로드 | |
| 2017-01-13 | 다운로드 | |
| 2017-01-13 | 다운로드 |
추천도서
오탈자 등록